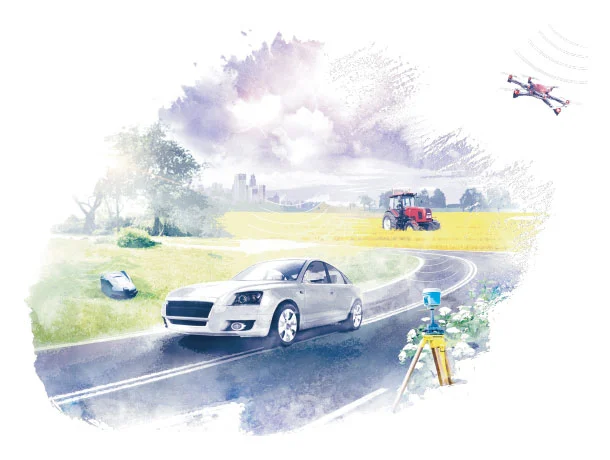
La soluzione Dual-RTK realizza il doppio RTK del posizionamento a doppia antenna a scheda singola e del ricevitore di intestazione (UM982). Fa pieno uso dei segnali dell'antenna principale e dell'antenna slave nel ricevitore GNSS, avvia il doppio algoritmo RTK e realizza l'uscita del risultato di posizionamento dual-RTK. I due RTK possono controllarsi per migliorare l'efficienza del posizionamento. Dopo aver abilitato la soluzione Dual-RTK, il ricevitore GNSS emetta due risultati di posizionamento RTK ad alta precisione, evidenziati in modo chiaro come i risultati di posizionamento RTK dell'antenna master o slave. Questa tecnologia migliora l'affidabilità e migliora la disponibilità del ricevitore GNSS, specialmente nelle vere attività stradali e agricole. Quando il segnale dell'antenna principale è bloccato, l'antenna principale non può produrre risultati di posizionamento RTK ad alta precisione, ma l'antenna slave può ancora fare la soluzione di posizionamento RTK, fornire informazioni affidabili sulla posizione ad alta precisione per UAV, macchine agricole automatiche di agricoltura di precisione e robot da esterno ecc.
 EN
EN  JP
JP  fr
fr  de
de  es
es  vi
vi  it
it  pt
pt  ms
ms  CN
CN